这次拿来开刀的是WS2812,具体代码可见 => https://github.com/raspberrypi/pico-examples/blob/master/pio/ws2812/ws2812.pio
.program ws2812
.side_set 1
.define public T1 2
.define public T2 5
.define public T3 3
.lang_opt python sideset_init = pico.PIO.OUT_HIGH
.lang_opt python out_init = pico.PIO.OUT_HIGH
.lang_opt python out_shiftdir = 1
.wrap_target
bitloop:
out x, 1 side 0 [T3 - 1] ; 先从移位寄存器取出1个bit到x,并且数据引脚为0,保持T3个周期.
jmp !x do_zero side 1 [T1 - 1] ; 如果取出的这个bit是0,则跳转到设置0,跳转前保持1状态T1个周期.
do_one:
jmp bitloop side 1 [T2 - 1] ; 如果上面没跳转就会到这里设置1,保持高T2个周期.
do_zero:
nop side 0 [T2 - 1] ; 如果跳转了,就保持T2个周期的低.
.wrap其中wrap_target到wrap包裹的部分,是整个函数的实体,假设PUSH进去的是0xAA(10101010b),其实际时序就会如下,记住命令本身也占一个周期:
[T3T1T2].... => [0001111111][0001100000]........
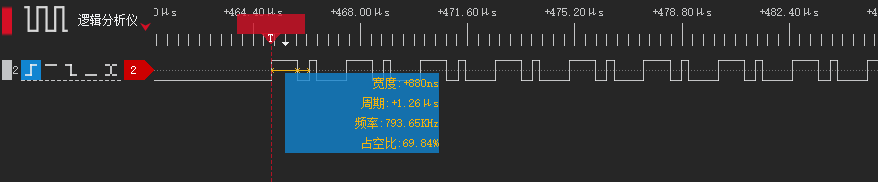
注意他实际上被捕获到是:
(LLL)[HHHHHHHLLL][HHLLLLLLLL]....
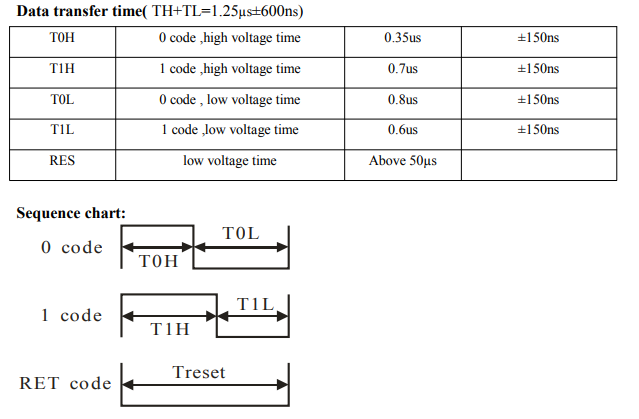
这样只要每周期是120ns,就可以满足时许的要求(似乎有些超出),发送0要求([200 ~ 500]ns + [650 ~ 950]ns),发送1要求([550 ~ 850]ns + [450 ~ 750]ns).
(LLL)[840ns H + 360 ns L][240 ns H + 960 ns L]
由于一次传输32B,所以最后的8B就没有意义了,要连续传输必须用其他方法.

官方这个程序是简洁,但是不够完美,时许吻合度不够,而且一旦空闲就会复位,我决定重写一个我自己的版本,虽然没那么精简,就开始试试.
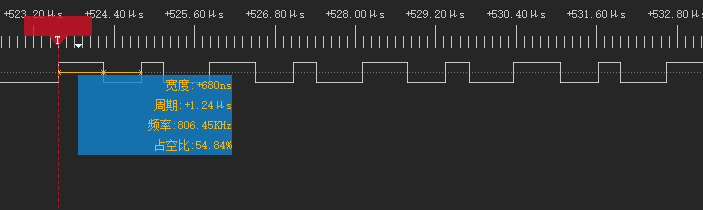
我期望的目标还是120ns一个周期,但是0编码成[HHHLLLLLL],1编码成[HHHHHHLLLLL]
.wrap_target
bitloop:
out x, 1 side 0 [3] ; Side-set still takes place when instruction stalls
jmp !x do_zero side 1 [2] ; Branch on the bit we shifted out. Positive pulse
do_one:
nop side 1 [2] ; Continue driving high, for a long pulse
jmp bitloop side 0 ; Padding zero
do_zero:
nop side 0 [1] ; Or drive low, for a short pulse
.wrap测试结果:
程序中除了汇编部分,还有入口部分.
static inline void ws2812_program_init(PIO pio, uint sm, uint offset, uint pin, float freq, bool rgbw) {
pio_gpio_init(pio, pin);
pio_sm_set_consecutive_pindirs(pio, sm, pin, 1, true);
pio_sm_config c = ws2812_program_get_default_config(offset);
sm_config_set_sideset_pins(&c, pin);
sm_config_set_out_shift(&c, false, true, rgbw ? 32 : 24);
sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_TX);
int cycles_per_bit = 11;
float div = clock_get_hz(clk_sys) / (freq * cycles_per_bit);
sm_config_set_clkdiv(&c, div);
pio_sm_init(pio, sm, offset, &c);
pio_sm_set_enabled(pio, sm, true);
}就刚才我们硬编码了Timing,所以这里也要做相应修改,比如cycles_per_bit应该改成11,这样才能刚好满足,这里还演示了如何设置sideset引脚,在主程序中还用pio_sm_put_blocking写入移位寄存器.
到此为止,就掌握了PIO的基本使用,总体来说,因为编程语言因素,还是有点吃力的,但是由于时间确定性和自由度,这一定会成为一个Magic外设.