测试时序:
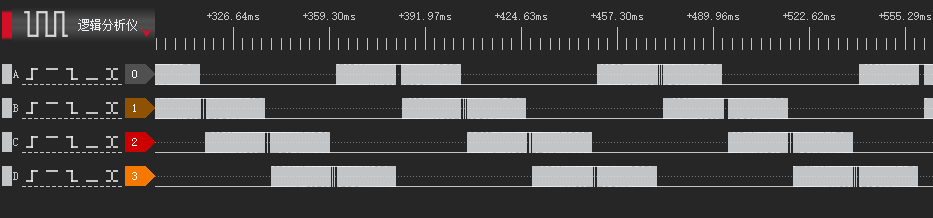
展开:
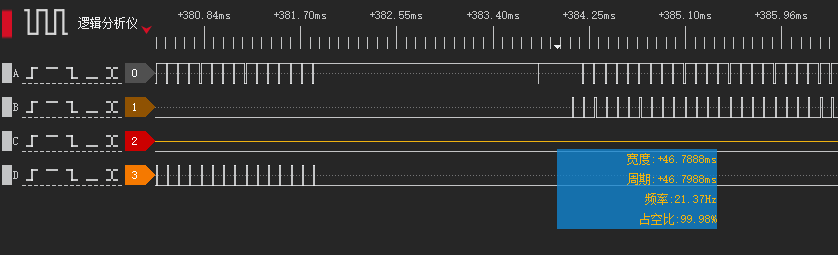
更细的微步:

微步原理:
程序代码:
#include "DSP28x_Project.h"
#include "sfo_v6.h"
#define STEP_SIZE 0.1
int MEP_ScaleFactor;
volatile struct EPWM_REGS *ePWM[PWM_CH] =
{&EPwm1Regs, &EPwm1Regs, &EPwm2Regs, &EPwm3Regs, &EPwm4Regs};
volatile int StepStatus;
volatile double StepData[4];
void PWM_Init()
{
uint8_t i = 0;
StepData[0] = 1.0f;
StepData[1] = 0.0f;
StepData[2] = 0.0f;
StepData[3] = 0.0f;
StepStatus = 0;
EALLOW;
GpioCtrlRegs.GPAPUD.bit.GPIO0 = 1; // Disable pull-up on GPIO0 (EPWM1A)
GpioCtrlRegs.GPAPUD.bit.GPIO2 = 1; // Disable pull-up on GPIO2 (EPWM2A)
GpioCtrlRegs.GPAPUD.bit.GPIO4 = 1; // Disable pull-up on GPIO4 (EPWM3A)
GpioCtrlRegs.GPAPUD.bit.GPIO6 = 1; // Disable pull-up on GPIO6 (EPWM4A)
GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 1; // Configure GPIO0 as EPWM1A
GpioCtrlRegs.GPAMUX1.bit.GPIO2 = 1; // Configure GPIO2 as EPWM2A
GpioCtrlRegs.GPAMUX1.bit.GPIO4 = 1; // Configure GPIO4 as EPWM3A
GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 1; // Configure GPIO6 as EPWM4A
while (SFO() != SFO_COMPLETE)
{
};
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
for (i = 1; i < 5; i++)
{
ePWM[i]->TBPRD = 6000;
ePWM[i]->TBPHS.half.TBPHS = 0;
ePWM[i]->TBCTR = 0;
ePWM[i]->TBCTL.bit.CTRMODE = TB_COUNT_UP;
if (i == 1)
{
ePWM[i]->TBCTL.bit.PHSEN = TB_DISABLE;
ePWM[i]->TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;
}
else
{
ePWM[i]->TBCTL.bit.PHSEN = TB_ENABLE;
ePWM[i]->TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
}
ePWM[i]->TBCTL.bit.HSPCLKDIV = TB_DIV1; // 2分频 设置时基时钟速率为系统时钟/2 = 60MHz / 2 = 30MHz
ePWM[i]->TBCTL.bit.CLKDIV = TB_DIV1; // 2分频,计算到TBPRD结束,1000就是30MHz=>30kHz
ePWM[i]->CMPCTL.bit.SHDWAMODE = CC_SHADOW; // 是否使用影子寄存器
ePWM[i]->CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // 若使用影子寄存器,则加载条件模式选择.
ePWM[i]->CMPA.half.CMPA = 0; // 0 ~ 65535
ePWM[i]->AQCTLA.bit.CAU = AQ_CLEAR; // 递增计数时,发生比较寄存器A匹配时清除PWM1A输出
ePWM[i]->AQCTLA.bit.ZRO = AQ_SET; // 计数到0 PWM1A输出高电平
ePWM[i]->HRCNFG.all = 0x0;
ePWM[i]->HRCNFG.bit.EDGMODE = HR_FEP;
ePWM[i]->HRCNFG.bit.CTLMODE = HR_CMP;
ePWM[i]->HRCNFG.bit.HRLOAD = HR_CTR_ZERO;
ePWM[i]->CMPA.half.CMPAHR = 0; // HRPWM部分 0 ~ 255
}
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
}
void PWM_Set(uint8_t ch, double value)
{
uint32_t val;
val = value * 1536000.0f;
EALLOW;
ePWM[ch]->CMPA.half.CMPA = (val >> 8);
ePWM[ch]->CMPA.half.CMPAHR = (val & 0xFF);
EDIS;
}
void PWM_Step()
{
if (StepStatus == 0)
{
StepData[0] = StepData[0] - STEP_SIZE;
StepData[1] = 1.0f - StepData[0];
if (StepData[1] >= 1.0f)
{
StepData[0] = 0.0f;
StepData[1] = 1.0f;
StepStatus = 1;
}
}
else if (StepStatus == 1)
{
StepData[1] = StepData[1] - STEP_SIZE;
StepData[2] = 1.0f - StepData[1];
if (StepData[2] >= 1.0f)
{
StepData[1] = 0.0f;
StepData[2] = 1.0f;
StepStatus = 2;
}
}
else if (StepStatus == 2)
{
StepData[2] = StepData[2] - STEP_SIZE;
StepData[3] = 1.0f - StepData[2];
if (StepData[3] >= 1.0f)
{
StepData[2] = 0.0f;
StepData[3] = 1.0f;
StepStatus = 3;
}
}
else if (StepStatus == 3)
{
StepData[3] = StepData[3] - STEP_SIZE;
StepData[0] = 1.0f - StepData[3];
if (StepData[0] >= 1.0f)
{
StepData[3] = 0.0f;
StepData[0] = 1.0f;
StepStatus = 0;
}
}
PWM_Set(1, StepData[0]);
PWM_Set(2, StepData[1]);
PWM_Set(3, StepData[2]);
PWM_Set(4, StepData[3]);
}
void main(void)
{
#ifdef _FLASH
memcpy(&RamfuncsRunStart, &RamfuncsLoadStart, (size_t)&RamfuncsLoadSize);
#endif
InitSysCtrl();
InitGpio();
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
PWM_Init();
for (;;)
{
PWM_Step();
while (SFO() != SFO_COMPLETE)
{
};
}
}